Von der Idee zum Produkt
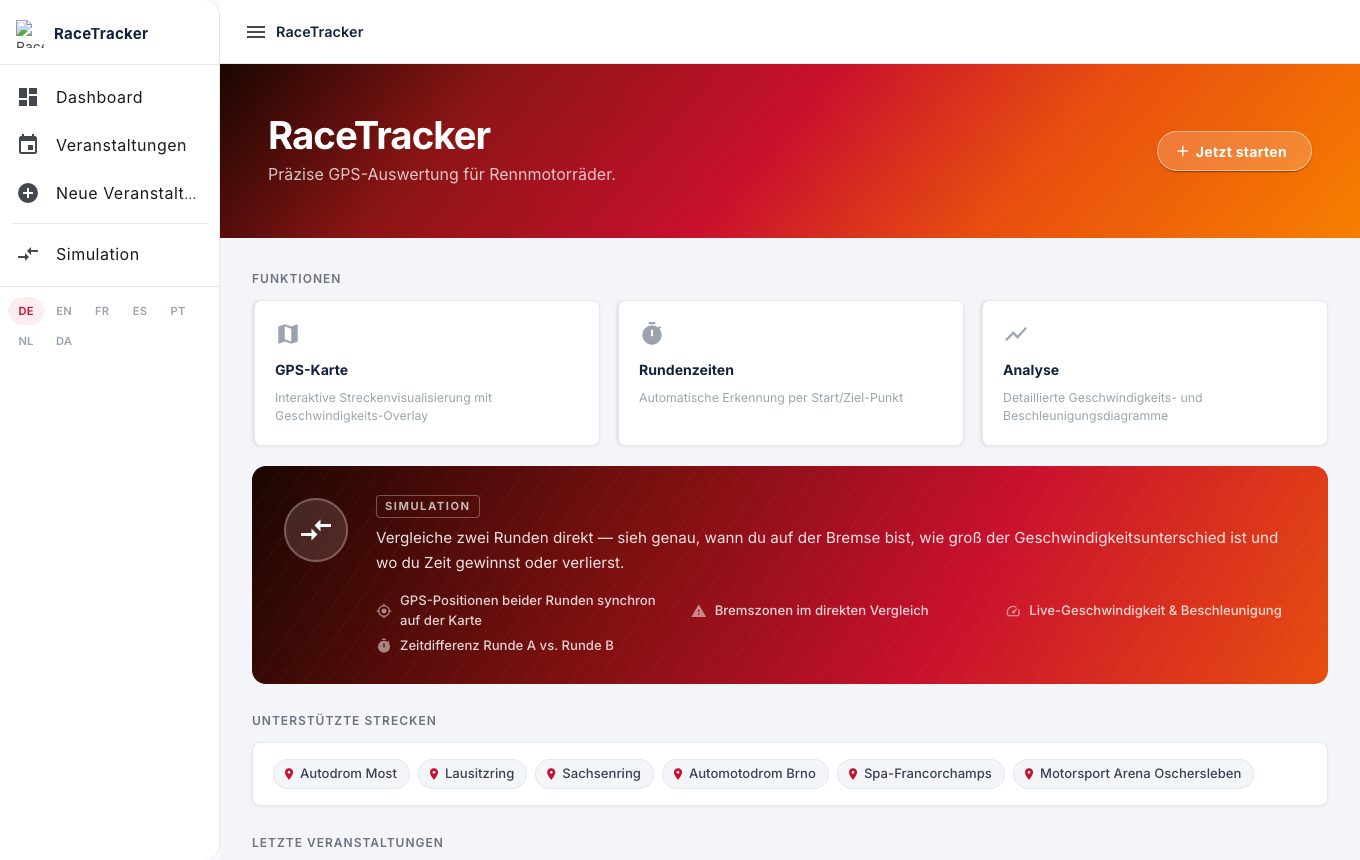
Was als Frustration über unzuverlässige Consumer-Laptimer begann, wurde zu einem vollständigen Ökosystem aus Hardware, Software und Analyse.
Die Frage: Geht es genauer?
Consumer-GPS-Logger liefern ±3–5 m Genauigkeit — zu ungenau, um Bremspunkte oder Kurvenlinien seriös zu vergleichen. Die Idee: RTK-Korrektionen via NTRIP über WLAN direkt auf dem Motorrad empfangen, kombiniert mit einem u-blox GPS-Modul und einem Arduino MKR WiFi 1010.
Arduino + u-blox + NTRIP
Der erste Prototyp kombiniert einen Arduino MKR WiFi 1010 mit einem NEO-M8N GPS-Modul und einem MPU6050 IMU. Ein eigener UBX-Parser (ohne SparkFun-Library) liest NAV-PVT-Nachrichten mit 8 Hz aus. RTCM3-Korrektionen vom NTRIP-Caster rtk2go.com werden über WiFi empfangen und direkt an den GPS-Chip weitergeleitet. Ein Deek-Robot SD-Shield schreibt jede Messung als CSV-Zeile auf die Speicherkarte.
Vom Prototyp zum Datenlogger
Die Nav-Rate wird auf 20 Hz erhöht. Die Zeitstempel nutzen UTC-Datum
plus Nanosekunden-Offset aus dem NAV-PVT-Datagramm, um echte
Unix-Millisekunden zu berechnen. Das CSV-Format: timestamp,lat,lon —
direkt importierbar in die Web-App.
Parametrisches SLA-Design in OpenSCAD
Das aerodynamische Tropfengehäuse entsteht in OpenSCAD: parametrisch, vollständig dokumentiert, CC BY 4.0 lizenziert. Ein Schwalbenschwanz- Schlitten (dovetail) erlaubt werkzeugloses Einrasten am Fahrzeug. Gravierter Schriftzug „RaceTracker" auf beiden Seiten, „RT 1.0" am Heck. Druckmaterial: UV-beständiges SLA-Resin (z. B. Siraya Sculpt Ultra).
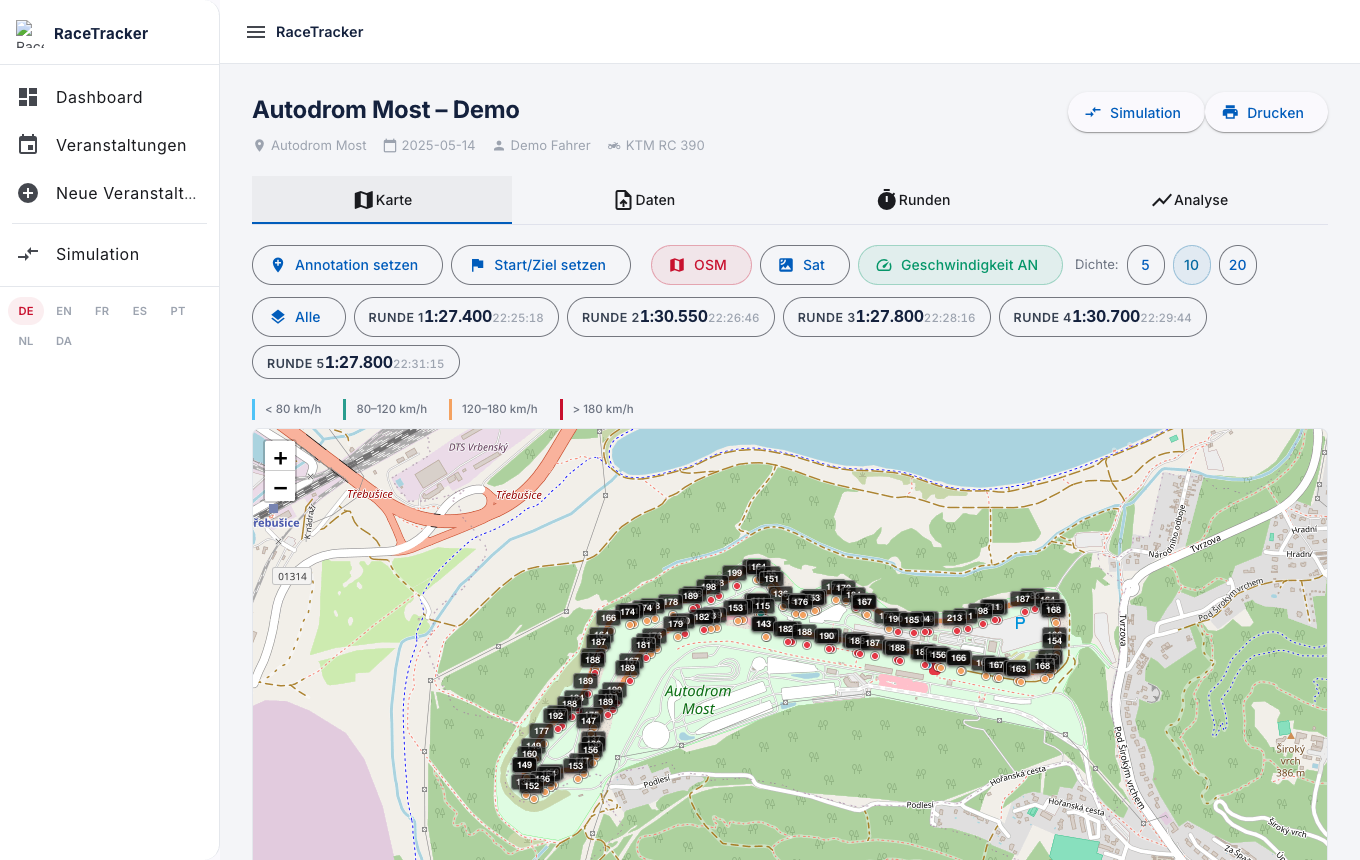
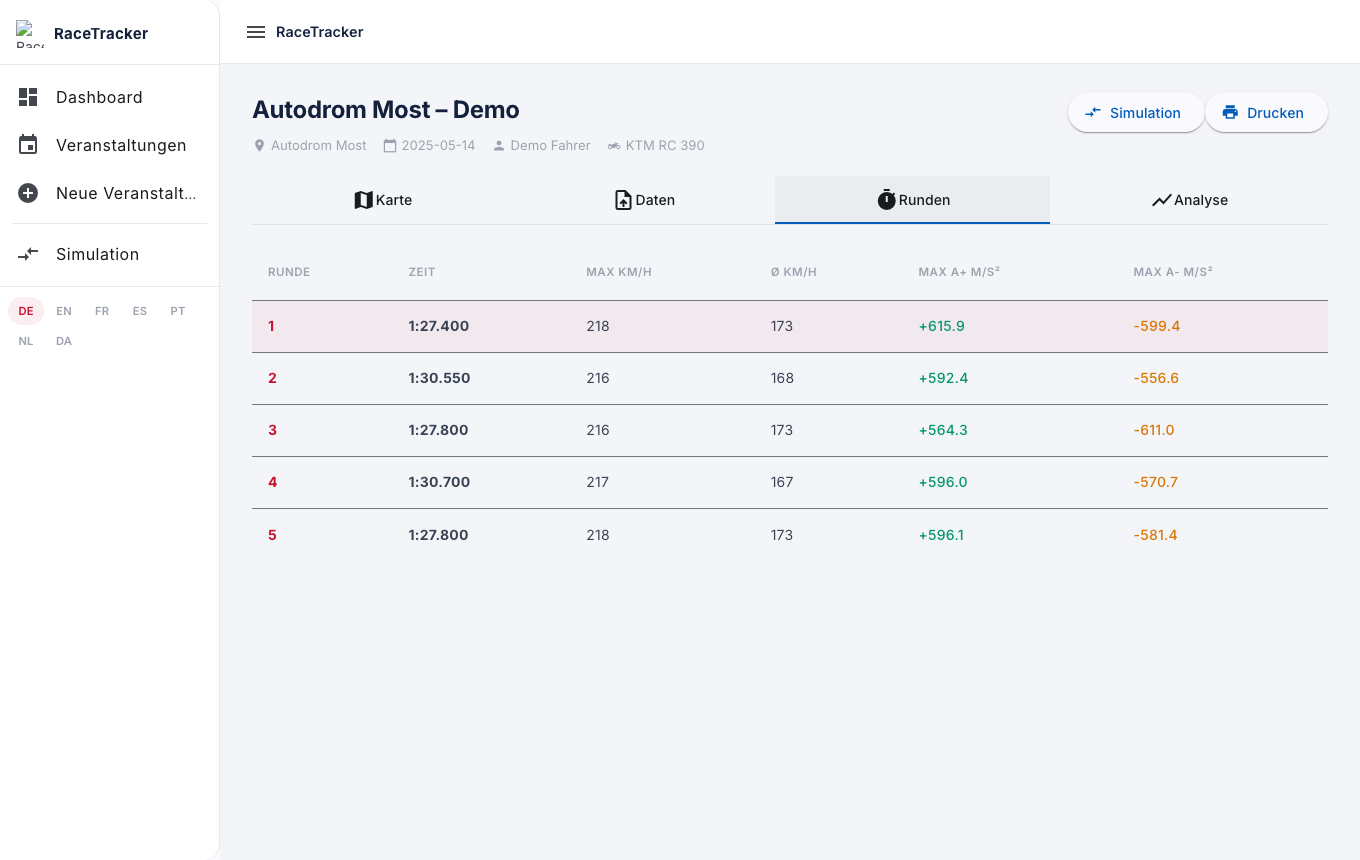
Angular + Leaflet + Chart.js
Die Browser-App visualisiert GPS-Daten auf einer Leaflet-Karte mit geschwindigkeitskodierter Fahrlinie, erkennt Runden automatisch per Geofencing, zeigt Bremszonen-Marker und Geschwindigkeitslabels an Beschleunigungs-Vorzeichenwechseln — alles offline, kein Backend.